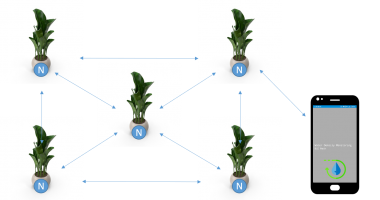
采用蓝牙Mesh的污染参数监测系统
项目中使用的工具物品 硬件 Arduino Uno - R3 LCD液晶屏套件16x2字符显示 Analog 气体传感器(MQ2) 40针公插头 10 个 USB A/Micro 线束 - 2m 10...
")


项目中使用的工具物品 硬件 Arduino Uno - R3 LCD液晶屏套件16x2字符显示 Analog 气体传感器(MQ2) 40针公插头 10 个 USB A/Micro 线束 - 2m 10...
项目简介...
项目简介 自动驾驶汽车开始统治世界。所以让我们试着做我们自己的赛车!
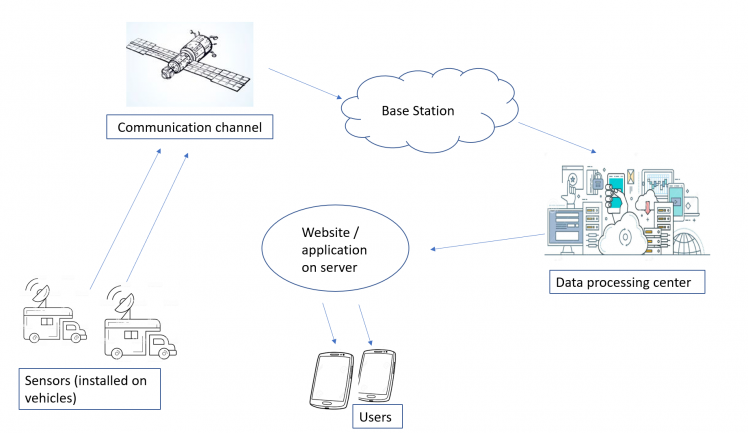
便携式导航信号采集及测试设备 可以完成30MHz~3.6GHz模拟信号的采集和存储回放,可以模拟仿真BDS、GPS、GLONASS和GALILEO多频点干扰信号和欺诈信号,主要用于GNSS 设备与应用测试、汽车自动驾驶测试、导航干扰测试、导航欺诈测试等领域。
便携式导航信号采集及测试设备 可以完成30MHz~3.6GHz模拟信号的采集和存储回放,可以模拟仿真BDS、GPS、GLONASS和GALILEO多频点干扰信号和欺诈信号,主要用于GNSS 设备与应用测试、汽车自动驾驶测试、导航干扰测试、导航欺诈测试等领域。
High-resolution sound and crystal-clear voice calls, an industry-first wireless audio retransmission case.
Agora's spatial audio technology enables you to simulate the propagation characteristics of sound...
The Spatial_Audio_Framework (SAF) is an open-source and cross-platform framework for developing...
IDUN audiobelieve that spatial audio is the future of any headphone solution, as it offers users...

CM52 series products are UWB+GNSS indoor and outdoor integrated positioning module solutions...
高解析度音质,水晶般清晰的语音通话,业界首创的无线音频重传充电仓。
2024年8月27日14:00-17:00 深圳湾万丽酒店大宴会厅边缘智能作为连接现实世界与数字世界的桥梁,正引领着工业自动化领域的发展新方向。尤其是伴随着大模型技术与边缘设备等终端的结合,工业领域呈现出高效率、低功耗、低成本、低时延等新特征。此外,在智慧电网、智能座舱、智能安全、新能源、智慧金融、机器人等诸多行业,边缘智能计算技术均展现出广阔的市场前景和强大竞争力。 ...
A speaker’s capability to connect to mobile bias like smartphones and the other smart bias in your...

便携式导航信号采集及测试设备 可以完成30MHz~3.6GHz模拟信号的采集和存储回放,可以模拟仿真BDS、GPS、GLONASS和GALILEO多频点干扰信号和欺诈信号,主要用于GNSS 设备与应用测试、汽车自动驾驶测试、导航干扰测试、导航欺诈测试等领域。
专业收音降噪直播麦克风 (抖音/直播/短视频/录音专用)
.短视频控制器 智能体验可支持短视频app点赞、上下翻页、音量加减。 .可自定义照片屏保支持手机本地相册图片 .智能一拖二耳机支持同时连接手机和充电仓,随心切换本地音乐和手机音乐
集成AI人工智能,一分钟快速辨体质。