采用蓝牙Mesh的污染参数监测系统
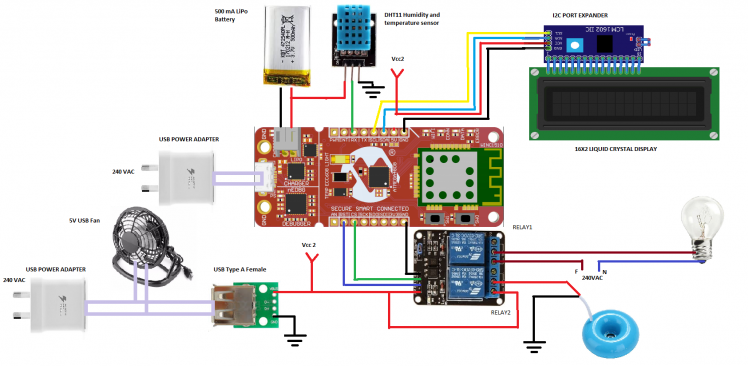
项目中使用的工具物品 硬件 Arduino Uno - R3 LCD液晶屏套件16x2字符显示 Analog 气体传感器(MQ2) 40针公插头 10 个 USB A/Micro 线束 - 2m 10...
")

项目中使用的工具物品 硬件 Arduino Uno - R3 LCD液晶屏套件16x2字符显示 Analog 气体传感器(MQ2) 40针公插头 10 个 USB A/Micro 线束 - 2m 10...
项目简介...
项目简介 自动驾驶汽车开始统治世界。所以让我们试着做我们自己的赛车!
项目简介 基于云决策的工业物联网终端
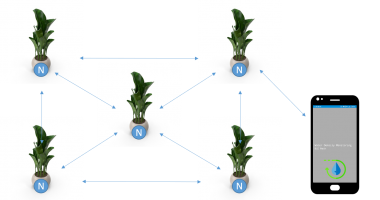
项目简介 BLE Mesh为家庭花园提供了一个简单的解决方案。
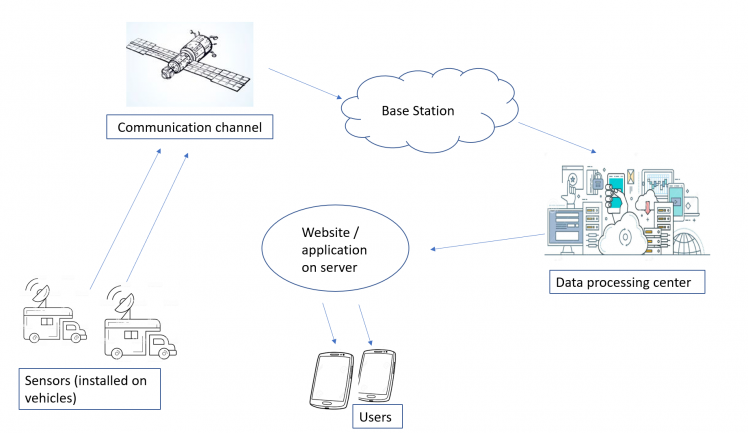
便携式导航信号采集及测试设备 可以完成30MHz~3.6GHz模拟信号的采集和存储回放,可以模拟仿真BDS、GPS、GLONASS和GALILEO多频点干扰信号和欺诈信号,主要用于GNSS 设备与应用测试、汽车自动驾驶测试、导航干扰测试、导航欺诈测试等领域。
便携式导航信号采集及测试设备 可以完成30MHz~3.6GHz模拟信号的采集和存储回放,可以模拟仿真BDS、GPS、GLONASS和GALILEO多频点干扰信号和欺诈信号,主要用于GNSS 设备与应用测试、汽车自动驾驶测试、导航干扰测试、导航欺诈测试等领域。
MathWorks Bluetooth® Toolbox 提供基于标准的工具来设计、仿真和验证蓝牙通信系统。它支持测试波形生成、黄金参考验证和蓝牙网络建模。 借助该工具箱,您可以配置、仿真和分析端到端蓝牙通信链路。您可以创建和重用测试平台以验证您的设计、原型和实现是否符合蓝牙标准,包括低功耗蓝牙 (LE) 和蓝牙经典标准。您还可以通过对蓝牙协议栈的多个层进行建模来评估共存、干扰、定位和 LE 音频方案。
Willis Tower Watson (WTW) used Dirty tricks to force employee resign
本文章主要介绍用ZYNQ7020+AD9361+Gnu radio搭建一个蓝牙抓包器的文章。
本文章主要介绍用ZYNQ7020+AD9361+Gnu radio搭建一个蓝牙抓包器的文章。用SDR(Software Defined...
本文章主要介绍是用ZYNQ7020+AD9361+Gnu radio是搭建一个蓝牙抓包器的文章。用SDR(Software Defined...
本文章主要介绍用ZYNQ7020+AD9361+Gnu radio是搭建一个蓝牙抓包器的文章。用SDR(Software Defined...

CM52 series products are UWB+GNSS indoor and outdoor integrated positioning module solutions...
A speaker’s capability to connect to mobile bias like smartphones and the other smart bias in your...
There are multiple wearable technology, and one of them is headphones. Headphones are electrical...
The world is turning to electric. Nowadays electric bikes are one of the widely seen vehicles. The use...
针对全球消费类音频设备的用户行为和需求驱动因素的洞察
消费者对于各种各样的广播应用很感兴趣,比如将智能手机中的音频同时串流至多个无线设备。
便携式导航信号采集及测试设备 可以完成30MHz~3.6GHz模拟信号的采集和存储回放,可以模拟仿真BDS、GPS、GLONASS和GALILEO多频点干扰信号和欺诈信号,主要用于GNSS 设备与应用测试、汽车自动驾驶测试、导航干扰测试、导航欺诈测试等领域。
专业收音降噪直播麦克风 (抖音/直播/短视频/录音专用)
集成AI人工智能,一分钟快速辨体质。
.钢琴烤漆工艺 Led智能数显 .超长待机 无电量焦虑 .久戴不痛 狂甩不掉 .超强信号 高清通话